St Robotics Parallel Greifer für Roboter Pneumatisch 7 → 25N
- RS Best.-Nr.:
- 124-2717
- Herst. Teile-Nr.:
- PG12
- Hersteller:
- St Robotics

Nicht verfügbar
Wir haben dieses Produkt aus dem Sortiment genommen.
- RS Best.-Nr.:
- 124-2717
- Herst. Teile-Nr.:
- PG12
- Hersteller:
- St Robotics
Technische Daten des gezeigten Artikels
Datenblätter und Anleitungen
Rechtliche Anforderungen
Informationen zur Produktgruppe
Finden Sie ähnliche Produkte, indem Sie ein oder mehrere Eigenschaften auswählen.
Alle auswählen | Eigenschaft | Wert |
|---|---|---|
| Marke | St Robotics | |
| Greifertyp | Pneumatisch | |
| Endeffektor | Parallel | |
| Anzahl von Fingern | 2 | |
| Greifkraft | 7 → 25N | |
| Hub | 6mm | |
| Alle auswählen | ||
|---|---|---|
Marke St Robotics | ||
Greifertyp Pneumatisch | ||
Endeffektor Parallel | ||
Anzahl von Fingern 2 | ||
Greifkraft 7 → 25N | ||
Hub 6mm | ||
- Ursprungsland:
- GB
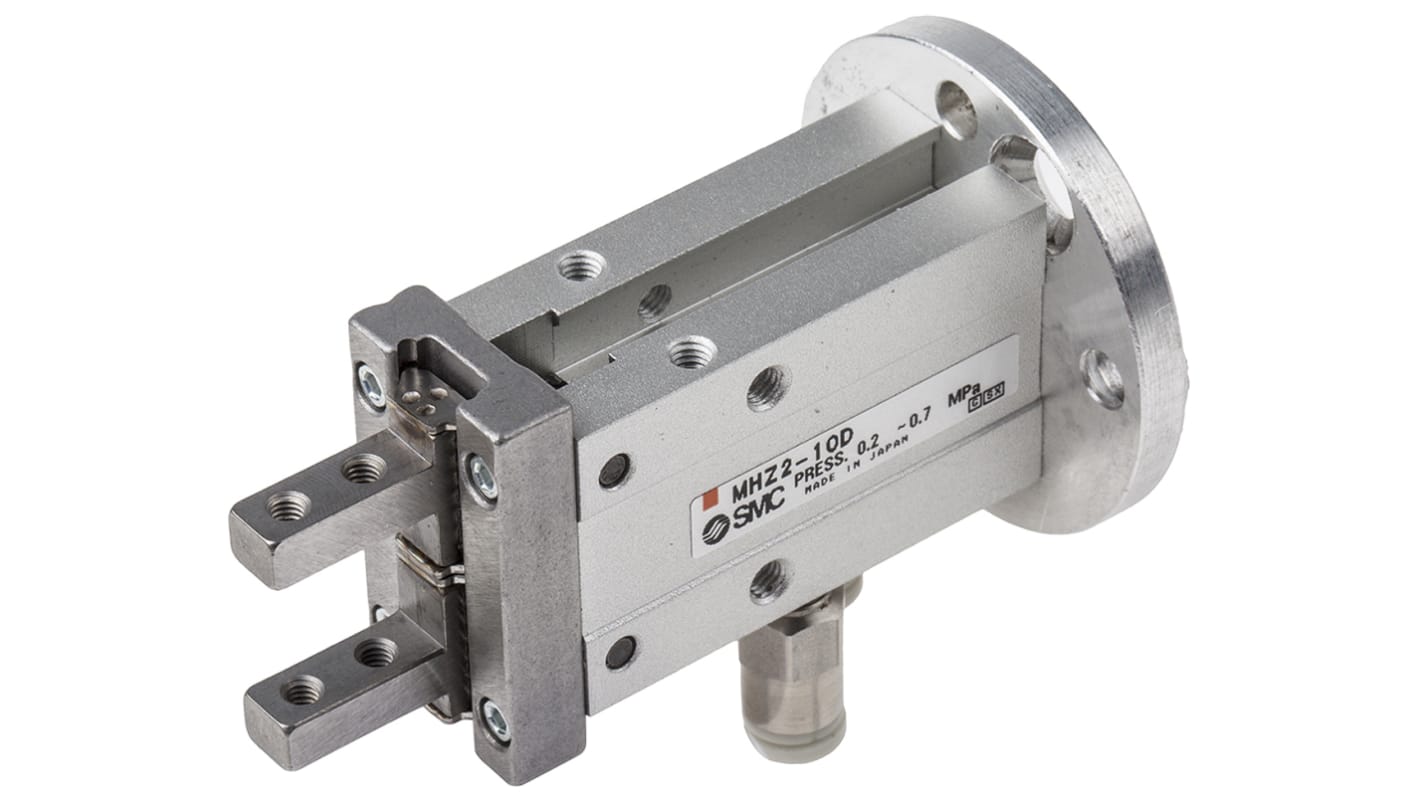
ST Robotics PG12 pneumatischer Greifer für R12
Der pneumatische Greifer PG12 für den Roboterarm R12 verfügt über ein SMC-Druckluftfutter mit schneller, präziser und hohe Greifkraft. Das System umfasst Ventil, Kabel und Steckverbinder. Die parallel angeordneten Greifbacken verfügen über Gewindebohrungen, mit deren Hilfe kundenspezifische Finger angebracht werden können.
Eigenschaften und Vorteile
• Maximaler Hub pro Finger: 2 mm (4 mm insgesamt)
• Greifkraft: 7N - 25N (0,2 MPa - 0,7 MPa Druck)
• Fingerausführung: 2x M2,5 Gewindebohrung pro Finger
• Greifkraft: 7N - 25N (0,2 MPa - 0,7 MPa Druck)
• Fingerausführung: 2x M2,5 Gewindebohrung pro Finger
Informationen zur Produktanwendung
Aufgrund der hohen Greifkraft eignet sich der pneumatische Greifer ideal für Aufgaben im Labor und kann kundenspezifisch angepasst werden, um bestimmte Gegenstände festzuhalten.